Francesco Piccoli

From Italy, living in New York. Outside of tech, I love languages and sports.
![]()
![]()
Pedestrian Intention Recognition
Github repo:
![]()
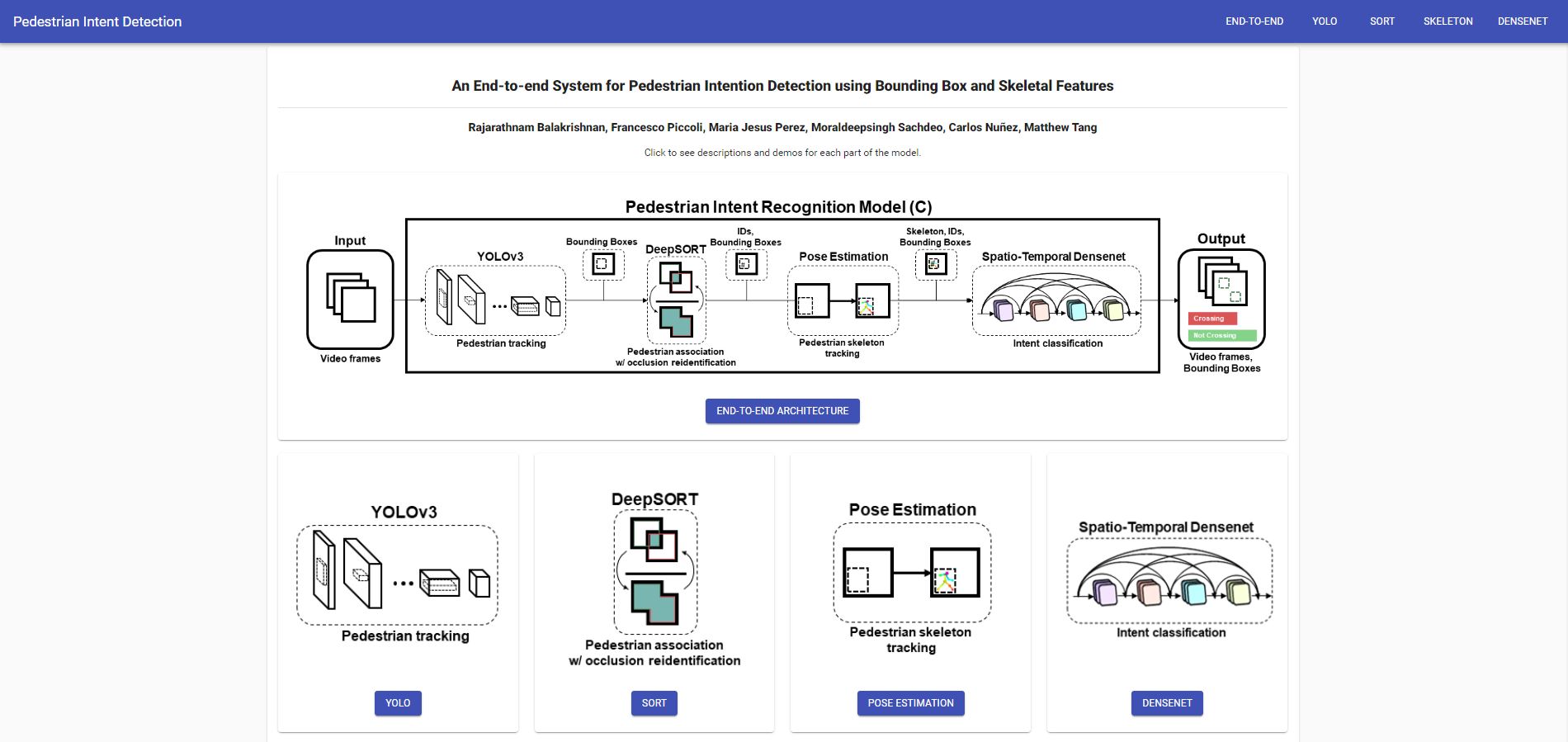
Website:
![]()
End-to-end architecture results

Project description:
Collaborative research project between Volvo Cars, UC Berkeley, and Chalmers University.
Active safety for autonomous driving scenarios relies on smart detection of the ego-vehicle environment conditions, most importantly the detection and prediction of pedestrian and bicyclist intentions. Here, pedestrian/bicyclist intention prediction refers to automatically estimating the positions and intentions of pedestrians in the next few seconds with the goal of evaluating the individual risk associated with the ego vehicle. An ideal system will predict where a pedestrian may want to be in the next few seconds. This information is valuable to autonomous vehicles that can then incorporate it to predict and thus prevent any possible collisions. Surveys have shown that the number of fatal and severe accidents caused by vehicle crashes each year is steeply rising. The envisioned smart collision avoidance system can be heavily beneficial in reducing vehicle and pedestrian/bicyclist accidents across the globe. In the meanwhile, the development of autonomous vehicles has seen significant growth and development. Functionalities such as object detection, object tracking, road segmentation, localization, and mapping have been studied for a long time now. Pedestrian intention prediction, however, has not been so widely analyzed yet. Since intention prediction algorithms can be developed from the existing areas of object detection and object tracking, this project aims to analyze information from video analysis to deliver an end-to-end system that can interface with autonomous driving functionalities for smart collision avoidance in autonomous driving and active safety scenarios.
Website Interface